diff --git a/README.md b/README.md index 60bb722ebcda02032e7cb4e675daca94443ceb88..b4688ac51710c8e14f34853c55d87e19e77b4a58 100644 --- a/README.md +++ b/README.md @@ -116,7 +116,7 @@ First of all you might want to change some things in the code to adapt it to you To set the options of the skeleton, go to: -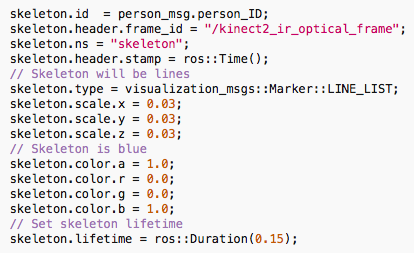 + Once you have set the options repeat step 3 of the installation process. Now that you have configured it, you can run the code. First of all connect your RGB-D and run the corresponding ROS drivers.